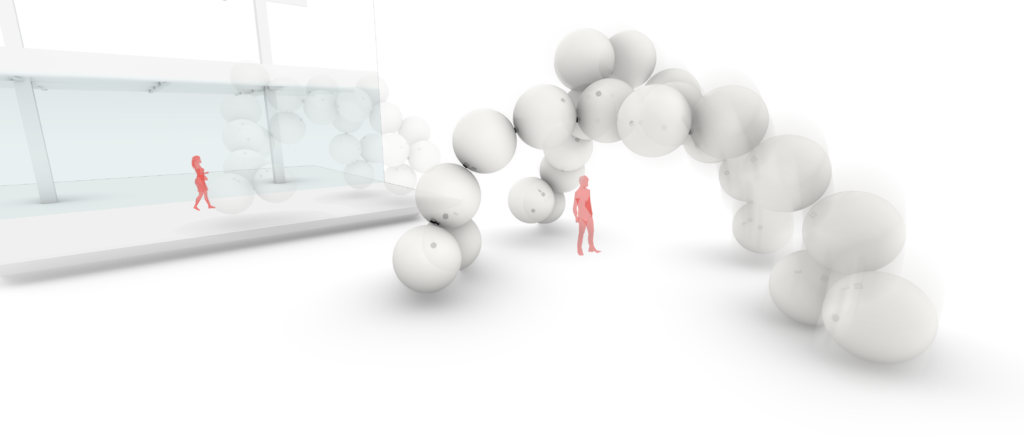
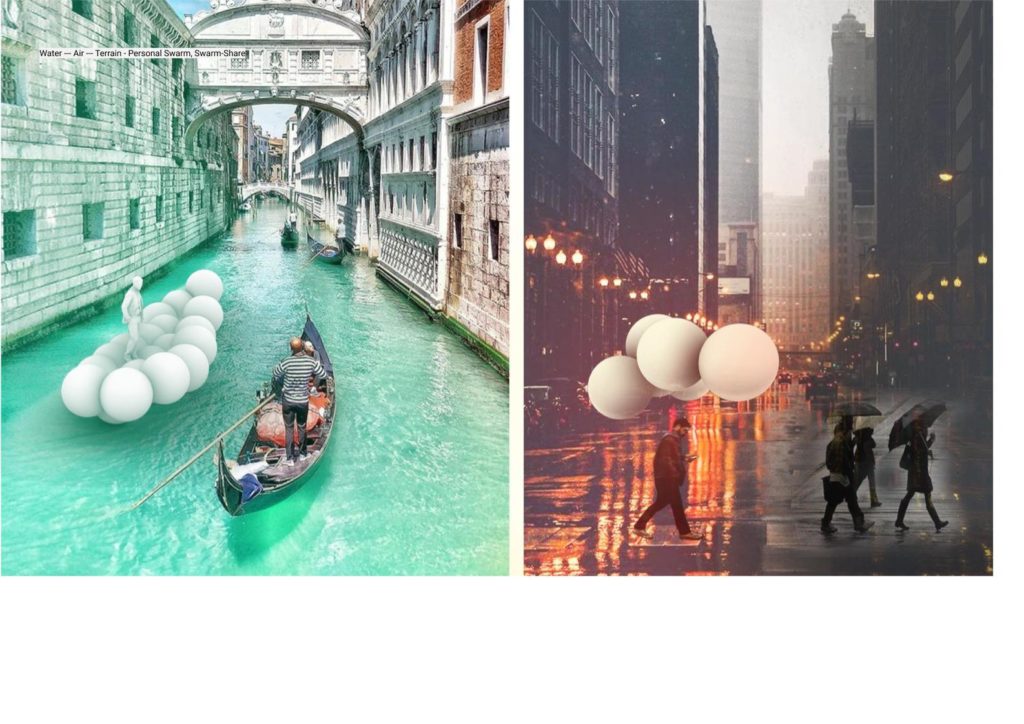


Meta-morph
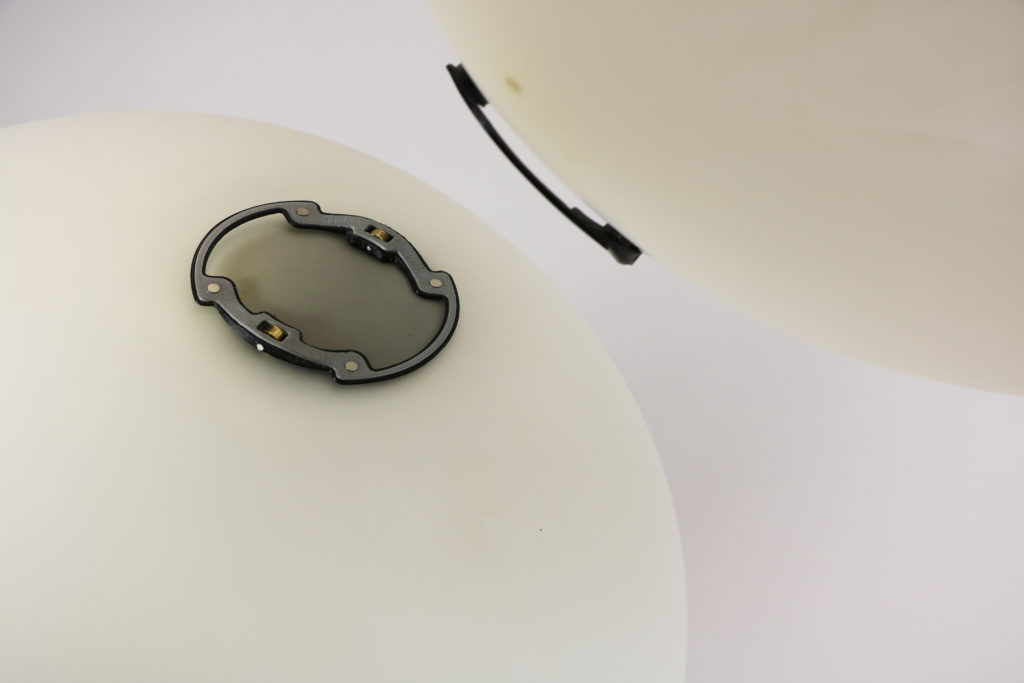
Adaptive architectural system using infinite-axis distributed robots. Embedding distributed robots in the connections of a soft, lightweight modular building system can create swarm structures that adapt their properties and behaviors through the use of infinite axis connection nodes.
Students: Nate Kaylor, Plant Songkhroh
Tutor: Dylan Wood, Jan Petrš
Supervisor: Prof. Achim Menges, Jun.-Prof. Hanaa Dahy
Design Studio: ITECH Master Thesis, 2018/19, University of Stuttgart.